[Rust] 포텐셔미터로 LED 밝기를 제어하기
schedule2025-12-09
schedule 약 2분
개요
포텐셔미터(가변저항)를 사용하여 Rust로 LED 밝기를 제어하는 방법을 보여드립니다. Raspberry Pi는 기본적으로 아날로그 입력을 처리할 수 없으므로, ADC(아날로그-디지털 변환기) 모듈을 사용하여 아날로그 값을 디지털 값으로 변환합니다. 읽은 값에 따라 PWM(펄스 폭 변조)의 듀티 사이클을 조정하여 LED 밝기를 제어합니다.
사용 부품
이 프로젝트에 필요한 부품은 다음과 같습니다:
- Raspberry Pi (40 GPIO) × 1개
- GPIO 확장 보드 및 리본 케이블 × 1개
- 브레드보드 × 1개
- 회전 포텐셔미터 × 1개
- 저항 10kΩ × 2개
- ADC 모듈 (PCF8591 또는 ADS7830) × 1개
- LED × 1개
- 점퍼 와이어 M/M × 17개
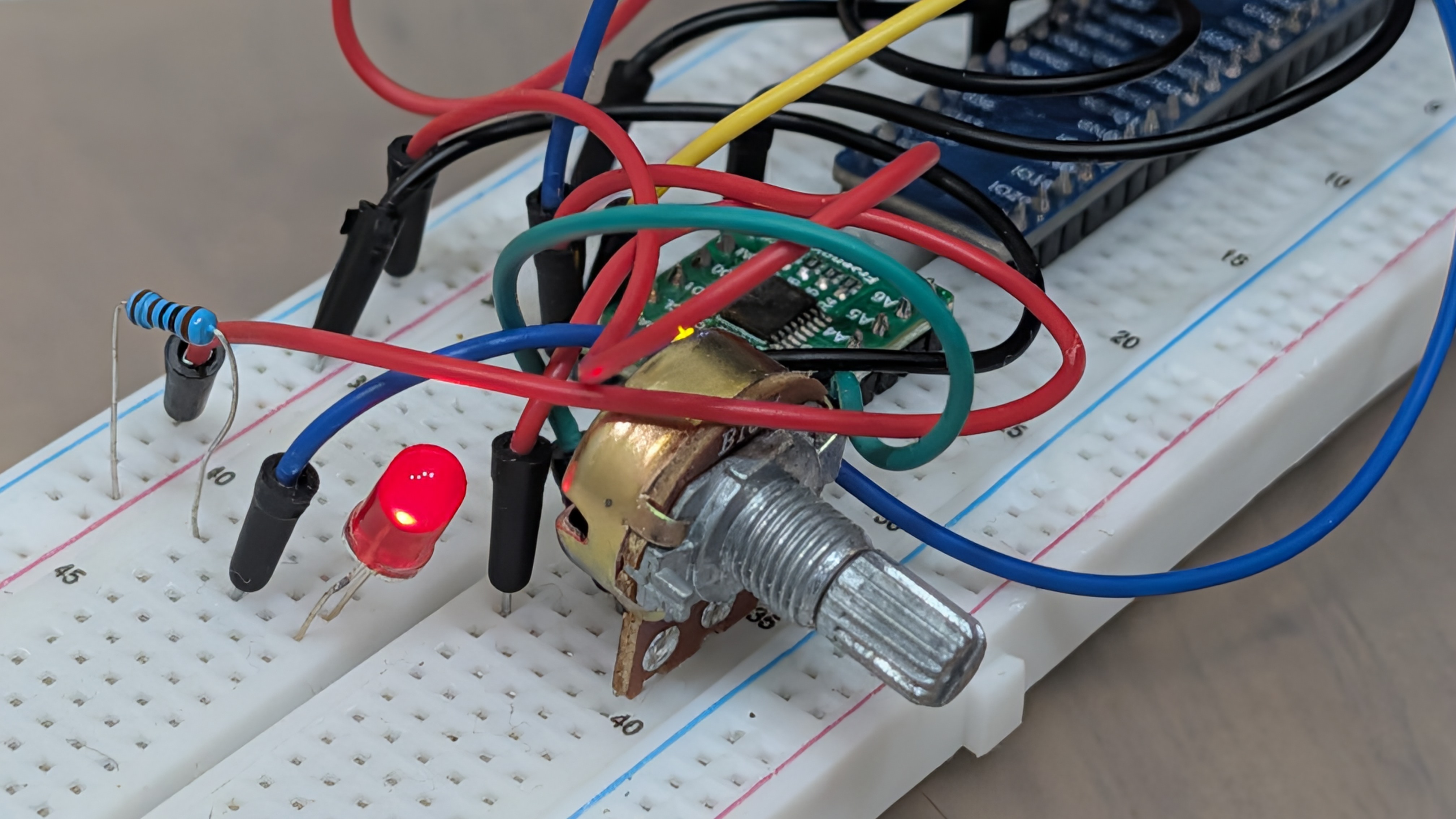
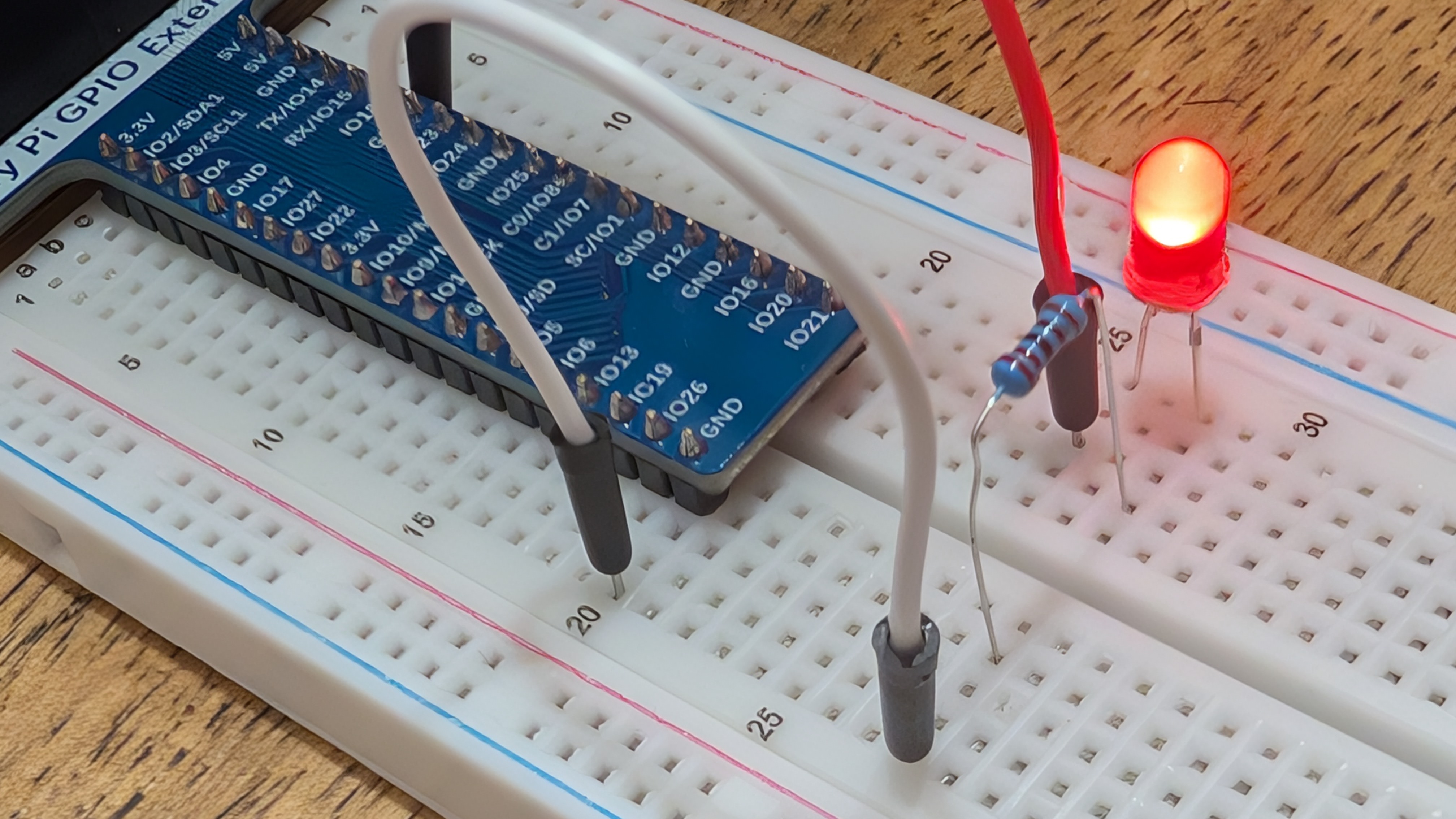
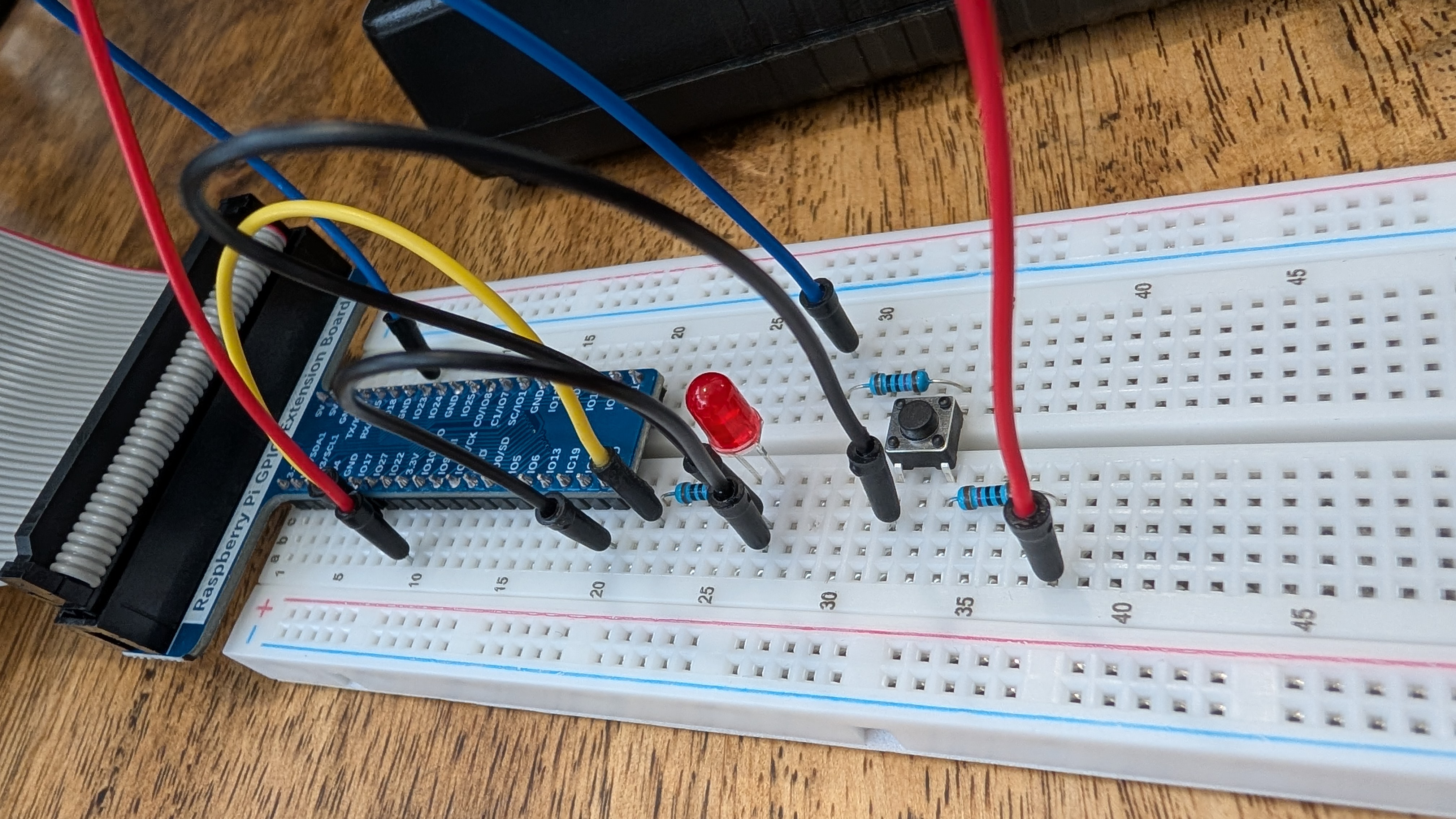
회로
회로도는 Freenove의 설명서를 참고하세요. PCF8591 또는 ADS7830 ADC 모듈 중 하나를 사용하여 회로를 구성할 수 있습니다.
코드
Cargo.toml에 rppal과 ctrlc를 추가하고 다음 코드를 구현하세요.
이 코드는 I2C 버스의 디바이스(PCF8591 또는 ADS7830)를 자동으로 감지하고 포텐셔미터에서 아날로그 값을 읽습니다. 읽은 값에 따라 별도의 스레드에서 실행되는 소프트웨어 PWM 제어로 LED 밝기를 조정합니다.
use std::error::Error;
use std::sync::atomic::{AtomicBool, AtomicU8, Ordering};
use std::sync::Arc;
use std::thread;
use std::time::Duration;
use rppal::gpio::Gpio;
use rppal::i2c::I2c;
const PCF8591_ADDR: u16 = 0x48;
const ADS7830_ADDR: u16 = 0x4b;
// GPIO 17 (BCM)
const LED_PIN: u8 = 17;
fn main() -> Result<(), Box<dyn Error>> {
println!("Program is starting ...");
// Initialize I2C
let mut i2c = I2c::new()?;
// Detect I2C device with retries
let mut is_pcf8591 = None;
for _ in 0..5 {
if i2c.set_slave_address(PCF8591_ADDR).is_ok() && i2c.read(&mut [0]).is_ok() {
is_pcf8591 = Some(true);
break;
} else if i2c.set_slave_address(ADS7830_ADDR).is_ok() && i2c.read(&mut [0]).is_ok() {
is_pcf8591 = Some(false);
break;
}
thread::sleep(Duration::from_millis(100));
}
let is_pcf8591 = match is_pcf8591 {
Some(v) => v,
None => {
eprintln!("No correct I2C address found after retries,");
eprintln!("Please use command 'i2cdetect -y 1' to check the I2C address!");
eprintln!("Program Exit.");
std::process::exit(-1);
}
};
println!(
"Detected I2C device: {}",
if is_pcf8591 { "PCF8591" } else { "ADS7830" }
);
// Shared state for SoftPWM
let running = Arc::new(AtomicBool::new(true));
let duty_cycle = Arc::new(AtomicU8::new(0));
// Spawn SoftPWM thread
let pwm_handle = {
let running = running.clone();
let duty_cycle = duty_cycle.clone();
thread::spawn(move || {
let gpio = match Gpio::new() {
Ok(g) => g,
Err(e) => {
eprintln!("Failed to access GPIO: {}", e);
return;
}
};
let mut pin = match gpio.get(LED_PIN) {
Ok(p) => p.into_output(),
Err(e) => {
eprintln!("Failed to get GPIO pin {}: {}", LED_PIN, e);
return;
}
};
// 1 kHz frequency = 1000 us period
let period_micros = 1000u64;
while running.load(Ordering::SeqCst) {
let duty = duty_cycle.load(Ordering::SeqCst) as u64;
if duty == 0 {
pin.set_low();
thread::sleep(Duration::from_micros(period_micros));
} else if duty == 255 {
pin.set_high();
thread::sleep(Duration::from_micros(period_micros));
} else {
// Calculate on/off times
// duty is 0..255
let on_time = (period_micros * duty) / 255;
let off_time = period_micros - on_time;
pin.set_high();
thread::sleep(Duration::from_micros(on_time));
if off_time > 0 {
pin.set_low();
thread::sleep(Duration::from_micros(off_time));
}
}
}
// Turn off LED on exit
pin.set_low();
})
};
// Setup CTRL-C handler
let running_clone = running.clone();
ctrlc::set_handler(move || {
println!("\nEnding program");
running_clone.store(false, Ordering::SeqCst);
})?;
// Main loop
while running.load(Ordering::SeqCst) {
let value_result: Result<u8, Box<dyn Error>> = if is_pcf8591 {
// PCF8591
i2c.set_slave_address(PCF8591_ADDR)
.and_then(|_| i2c.write(&[0x40]))
.and_then(|_| {
let mut buf = [0u8; 1];
i2c.read(&mut buf)?;
i2c.read(&mut buf)?;
Ok(buf[0])
})
.map_err(|e| e.into()) // Convert rppal::i2c::Error to Box<dyn Error>
} else {
// ADS7830
i2c.set_slave_address(ADS7830_ADDR)
.and_then(|_| i2c.write(&[0x84]))
.and_then(|_| {
let mut buf = [0u8; 1];
i2c.read(&mut buf)?;
Ok(buf[0])
})
.map_err(|e| e.into()) // Convert rppal::i2c::Error to Box<dyn Error>
};
match value_result {
Ok(value) => {
// Update PWM duty cycle
duty_cycle.store(value, Ordering::SeqCst);
// Display info
// Voltage reference 3.3V
let voltage = (value as f64 / 255.0) * 3.3;
println!("ADC Value : {}, Voltage : {:.2}", value, voltage);
}
Err(e) => {
eprintln!("Error reading I2C: {}", e);
// Optional: add a small delay or just continue to retry
}
}
thread::sleep(Duration::from_millis(30));
}
// Wait for PWM thread to finish
let _ = pwm_handle.join();
Ok(())
}요약
Rust를 사용하여 I2C 통신으로 ADC 모듈에서 값을 읽고, 그 값을 사용하여 LED 밝기를 제어하는 방법을 구현했습니다. 소프트웨어 PWM 구현을 통해 부드러운 제어를 달성했습니다. PWM 제어와 메인 ADC 읽기 루프를 서로 다른 스레드로 분리함으로써 반응성 있는 동작을 보장합니다.






댓글을 불러오는 중...